PROJELER
ROBOTİM
ROBOTİM
ROBOTİM Projesi, T.C. Savunma Sanayii Başkanlığı tarafından desteklenen bir Ar-Ge projesidir. Proje, Polonom Teknoloji Sanayi ve Ticaret AŞ liderliğinde Selvi Yazılım ve Donanım Teknolojileri Ltd. Şti. ile iş birliği içinde yürütülmektedir. Ayrıca TÜBİTAK BİLGEM, Yıldız Teknik Üniversitesi, Balıkesir Üniversitesi ve İstanbul Ticaret Üniversitesi de projeye alt yüklenici olarak katılmaktadır.
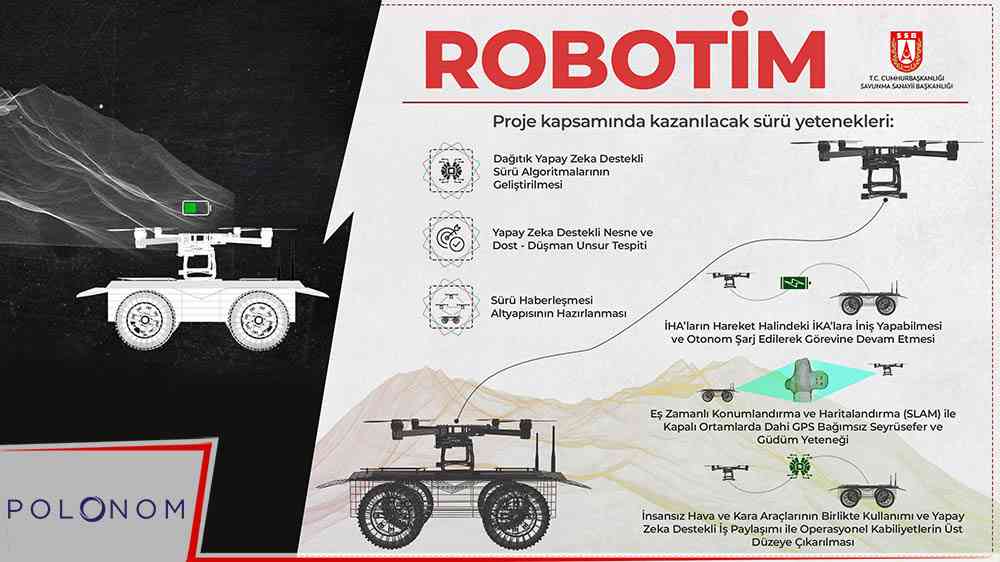
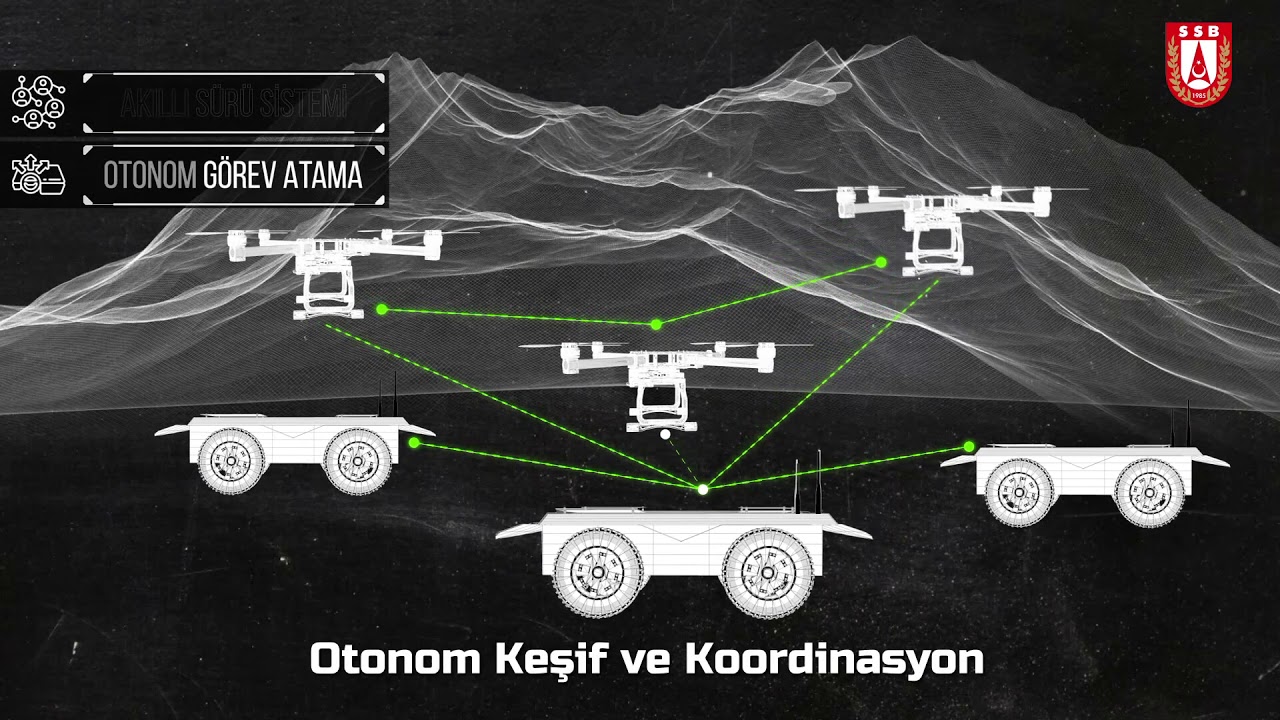
ROBOTİM projesinin amacı, iş birlikçi robotlar olan İnsansız Hava Araçları (İHA) ve İnsansız Kara Araçları (İKA) kullanarak otonom keşif, güdüm ve seyrüsefer konularında çözümler üretmektir. Proje kapsamında çözümlenmesi hedeflenen problemler aşağıda özetlenmiştir:
- Farklı sensör gruplarını içeren hava ve yer araçlarına sahip Heterojen Sürü Sistemi’nin yapılandırılması ve temel hareket altyapısının oluşturulması.
- Yer kontrol istasyonu için harita sunucusu, arayüz sunucusu ve veri bağı bileşenlerinin oluşturulması.
- Tüm araçların birbirleriyle ve yer kontrol istasyonuyla hızlı ve güvenli iletişim kurabilecekleri haberleşme altyapısının kurulması.
- Düşman unsurların ve potansiyel hedeflerin sıcaklık, görsel kanıtlar ve hareket gibi özelliklerine bakılarak belirlenmesi.
- Bilinmeyen bir ortamda düşman unsurlarını ve olası tehlike işaretlerini hızlı ve verimli bir şekilde keşfetmek için keşif algoritmalarının geliştirilmesi.
- Dolaşım sırasında ortamın 2B ve 3B haritalarının çıkarılması, GNSS imkânının olmadığı açık ve kapalı alanlarda hassas konum belirleyebilme.
- Keşif ve haritalama aşamalarında etkin bir görev atama yaklaşımının geliştirilmesi ve uygun maliyet fonksiyonunun bulunması.
- Her bir Sürü Unsuru üzerinde yerel konum belirleme, engelden kaçınma, yerel gezinme, yerel keşif ve yerel unsur tanıma kabiliyetlerinin gerçekleştirilmesi.
- Tüm Sürü Unsurlarından gelen konum bilgileri temel alınarak eş zamanlı olarak konum ve ortam haritasında oluşabilecek hataların düzeltilmesi.
- Karıştırmaya karşı dirençli bir sahte GNSS altyapısının oluşturulması ve Sürü Unsurlarının gerçek veya göreceli konum bilgisini bu altyapı aracılığıyla belirleyebilmesi.
- İHA’ların hareket hâlindeyken İKA’lar üzerine iniş yaparak bataryalarını şarj edebilme yeteneği.
TÜBİTAK BİLGEM, proje kapsamında yer alan keşif sistemindeki sürü unsurlarının uzak bir konumda yer alan Yer Kontrol İstasyonu’nda bir operatör tarafından kontrol edilebilmesini sağlamak için bir kullanıcı arayüzü yazılımı tasarlamaktadır. Bu arayüz, operatöre birçok yetenek sağlayacak şekilde geliştirilmektedir. Operatör, arayüz üzerinden sürüye görevler tanımlayabilecek, görevleri güncelleyebilecek ve iptal edebilecektir. Ayrıca, bölgenin taktik haritası üzerinden sürü ve keşif sırasında tespit edilen nesnelerin konumlarını takip edebilecek. Canlı görüntü ve video aktarımlarını sürüden alarak izleyebilecek ve ilgili araçlar tarafından keşfedilen bölgelerin 3 boyutlu haritalarını gözlemleyebilecektir. Ayrıca, farklı formasyonlar oluşturarak görevler için esneklik sağlayabilecektir.
20 Şubat 2020
Proje Başlangıç
Bilinmiyor
{kind=link}
{kind=link}
{kind=link}