PROJECTS
ROBOTIM
ROBOTIM
ROBOTIM Project is an R&D project supported by the Republic of Turkey Presidency of Defense Industries. The project is carried out under the leadership of Polonom Technology Industry and Trade Inc. in cooperation with Selvi Software and Hardware Technologies Ltd. TÜBİTAK BİLGEM, Yıldız Technical University, Balıkesir University and Istanbul Commerce University are also participating in the project as subcontractors.
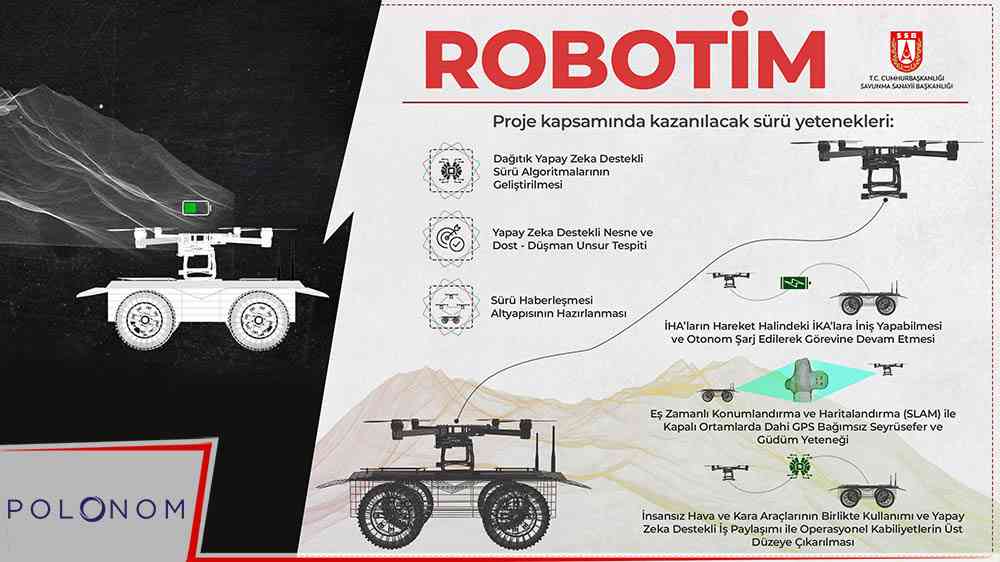
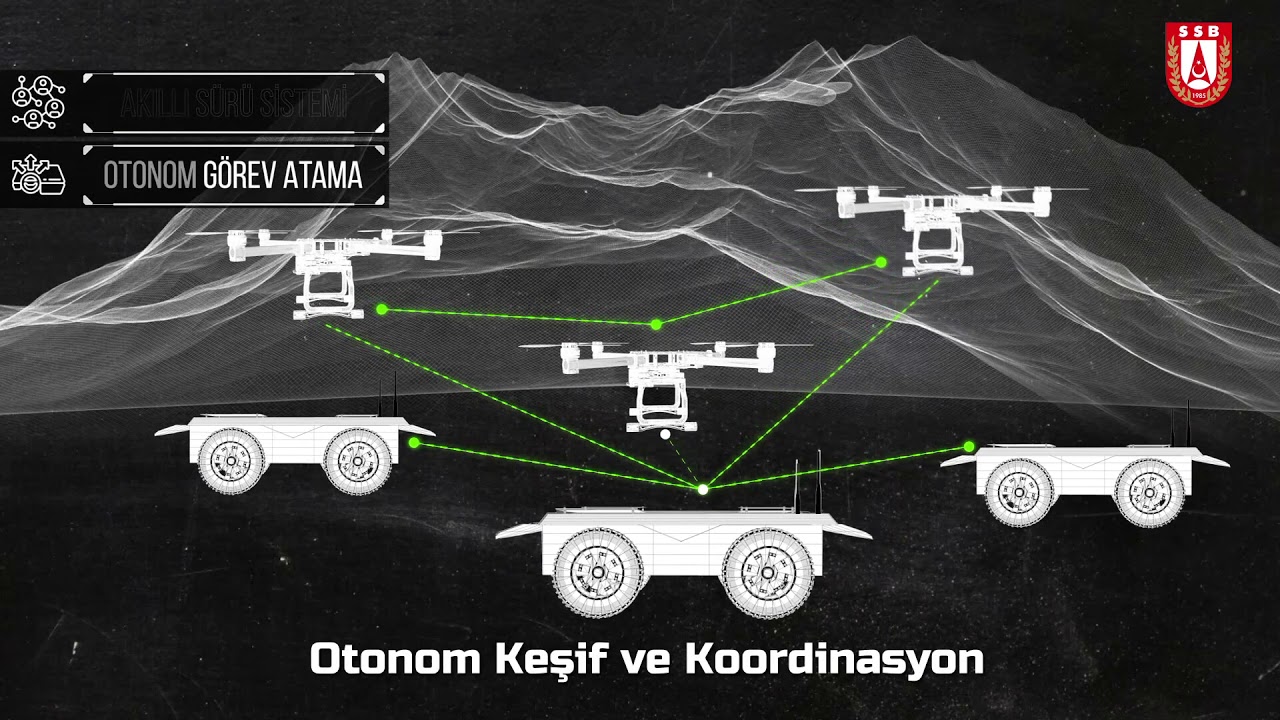
The aim of the ROBOTIM Project is to develop solutions for autonomous reconnaissance, guidance and navigation using collaborative robots such as Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs). The problems to be solved within the scope of the project are summarized below:
- Structuring the Heterogeneous Swarm System with air and ground vehicles including different sensor groups and establishing the basic movement infrastructure.
- Creating map server, interface server and data link components for the ground control station.
- Establishing a communication infrastructure where all vehicles can communicate quickly and securely with each other and with the ground control station.
- Identifying hostile elements and potential targets based on characteristics such as temperature, visual evidence and movement.
- Development of reconnaissance algorithms to quickly and efficiently discover enemy elements and potential danger signs in an unknown environment.
- 2D and 3D mapping of the environment during roaming, precise position determination in open and closed areas where GNSS is not available.
- Developing an efficient task assignment approach for exploration and mapping phases and finding the appropriate cost function.
- Realization of local localization, obstacle avoidance, local navigation, local reconnaissance and local element recognition capabilities on each Swarm Element.
- Based on the location information from all Swarm Elements, simultaneous correction of errors that may occur in the location and environment map.
- Creation of a tamper-resistant fake GNSS infrastructure and the ability of Swarm Elements to determine real or relative location information through this infrastructure.
- The ability of UAVs to charge their batteries by landing on UAVs on the move.
TÜBİTAK BİLGEM is designing a user interface software to ensure that the swarm elements in the reconnaissance system within the scope of the project can be controlled by an operator at the Ground Control Station located at a remote location. This interface is being developed to provide many capabilities to the operator. The operator will be able to define tasks for the swarm, update and cancel tasks through the interface. In addition, he will be able to track the locations of the swarm and the objects detected during reconnaissance on the tactical map of the region. It will be able to watch live image and video transmissions from the swarm and observe 3D maps of the areas explored by the relevant vehicles. It will also be able to provide flexibility for missions by creating different formations.
February 20, 2020
Project Start
Unknown
{kind=link}
{kind=link}
{kind=link}